見積りのご依頼はこちらへ pdfパンフレットはこちらからパスワードを入手してダウンロードできます。(無料)
ご注文の際はご注文書をお送りください。ご注文方法(個人、法人、公費購入)
RIEGL社LPMスキャンデータの収集・ビジュアル化及び処理ソフトLPMSCAN
|
LPM-SCAN (Laser Profile Measuring) は3DレーザーイメージセンサーLPM-i25A,LPM-2K,LPM-300VHS及びLPM-100VHS用のソフトウエアーパッケージです。 このソフトによって、センサーのコンフィグ、データ収集、データのビジュアル化、データ操作及びデータ保管などの多数の作業が行えます。 |
 |
・3DイメージセンサーLPMシリーズとのPCインターフェース ・3Dイメージセンサーのコンフィグ |
 |
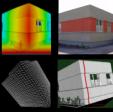
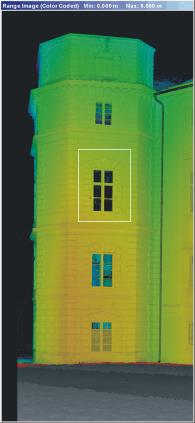
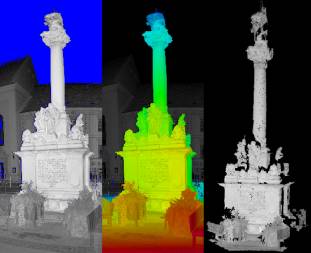
3Dデータのオンラインビジュアル化 * カラーコード化した距離画像 * 赤外線グレースケール画像 * パッシブ カラー画像 |
|
 |
・ データ選択 ・ データ処理 ・ データのエクスポート ・ 表面モデリング |
|
 |
・ 3Dデータセットの合成 ・ 3Dデータを既知の座標系に登録 |
|
  |
||
| 3Dレーザーイメージセンサーとのインタ-フェース |
|
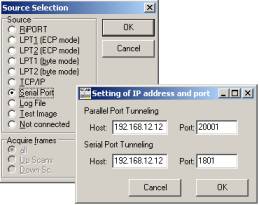
| LPM-SCANは装置からのデータの収集とセンサーの構築を行います。 通信はどのPCやノートブック PCにも付いているシリアルインターフェ-ス(RS232或いはRS422)を経由して行います。 どのようなWindows OSでもLPMをLAM環境にスムーズに組み入れることのできる「TCP/IP」経由のデータ収集も可能です。 LPM-SCANのTCP/IP機能を使用する為にはオプションの「TCP/IP イーサネットインターフェース」を装備しなければなりません。 |
 |
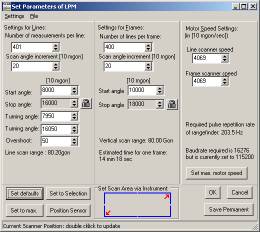
| 3Dレーザーイメージセンサーの構築 | |
| コンフィギュレーションユーティリティーは、既に収集されたデータ或いはセンサーの座標系を手動で参照する設定コンフィグパラメーターに基づいて3Dイメージセンサーの直感的な構築を行います。 コンフィギュレーションユーティリティーは、シリアルインターフェースを経由するローレベルコマンドに基づいた3Dセンサーとの通信を行うユーザーの作業を軽減します。 さらに、センサーが構築される前に、その設定の有効性がチェックされます。 特徴:
|
  |
| 3Dデータのビジュアライズ | |
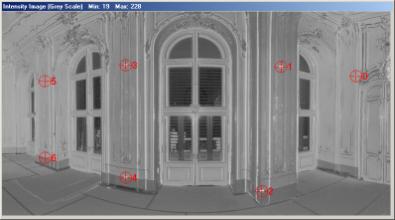
| LPM-SCANは、バイナリーデータから抽出して、カラーコード化した距離画像、目標物のレーザー波長での反射率を示す強度画像、及びそれらを組み合わせた画像を表示します。 カラー情報含んでいるデータはカラー画像としてビジュアル化することもできます。 これらの画像は、例えば2点間の距離のようなシンプルな測定課題を簡単に処理し、さらに後処理の為のデータ選択や、オンラインモードでの3Dセンサーのコンフィギュレーションを可能にします。 特徴::
|
 |
| データ処理及び選択 |
|
| 「3D―RiSCAN」は3Dスキャナーのバイナリーデータを、全ての必要なデコーディング手順及び変換方法を用いて、極座標、デカルト座標、反射率データ及びカラーデータ(オプション)に変換します。 スキャナーの高速測定レートによって、広範囲にわたる大量のデータを短時間に収集できます。 多くの場合、これらのデータの一部分だけが後処理の為に必要になります。 そこで「3D―RiSCAN」には、データにフィルター処理を行って、希望の測定データを選択する為の効率的なツールが準備されています。 これらのフィルターはデータのビジュアライゼイション及びデータのエクスポートに使用され、後処理ツールとのデータ交換が容易になります。 | |
極座標への変換(センサー自体の座標系)
|
 |
| データの登録及び合成 | |
| デカルト座標への変換には、予め定義された座標系におけるセンサーの位置と方位が考慮されます。 3Dデータは、例えば、既知の座標で認識された参照点からセンサーの位置と方位を決定するような、各種の方法に基づいてこの座標系に登録することができます。 このように、データ収集前は、希望の座標系に関して3Dスキャナーを位置決めしたり、アライメントする必要がありません。 複数の3Dデータセットの合成は、途切れなしに全ての方向から実際に見ることのできる3Dモデルを作り出します。 データの合成は、合成されるべき2つの3D画像内に最低4点を認識する事に基づいて行われます。 LPM-SCANの3D画像を収集中に、センサーの位置と方位データを自動的に計算します。
|
 |
| データの保存とエクスポート | |
| 3Dデータを保存する為のファイルフォーマットは、LMS-Z210の生データと同じです。 標準のフォーマットでデータをエクスポートすることによって、他の3Dデータ処理パッケージへのスムースなデータ変換が可能です。 | |
|
 |
| LPM-SCANのスクリプト | |
このスクリプト機能によって「LPM-SCAN」のデータ処理の標準的手順を自動化でき、編集も可能です。
|
 |
| その他の特徴 | |
データ合成や位置・方位決定の為に使用したプリズム反射器のリストの自動抽出
|
  |
| システム仕様 PC or laptop with Windows 95, Windows98, Windows NT4.0, Windows 2000. Recommended: Pentium II or AMD K6-II or higher, 64 MB RAM, 500 MB free disk space. |
|