RIEGL社 RiScanPro
下記のスキャナー用ソフトウエアー
LMS-Z210i, LMS-Z360, and LMS-Z420i
* グローバル座標へのレジストレーション
* データの可視化 及びデータ処理
* 後処理ソフトへのインターフェース
概 説
 Parameter setting of the scanner |
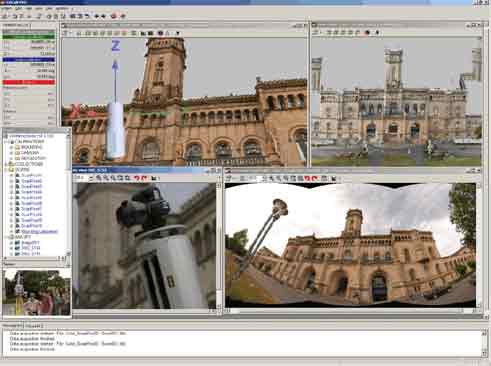
RiSCAN PROはリーグル社製スキャナーのLMS-Zシリーズ用のソフトウエアーです。 ソフトはプロジェクト指向で、測定中に収集された全データは、RiSCAN PROのプロジェクト構造内に整理され、保存されます。 これらのデータにはスキャンデータ自体、コントロールポイント及びタイポイントの座標、そして複数のスキャンのデータを共通の座標系に変換するのに必要な変換マトリックスが含まれています。 さらに、オプションの高分解能ディジタルカメラを装備した場合、カメラ画像もRiSCAN PROで扱えます(下記のカメラモジュールをご参照ください)。 RiSCAN PROは現場でのデータ収集時間が最短になるように設計されていますが、同時に現場でデータが完全に収集できかたどうかを3Dで目視検査できるツールも準備しています。 反射ターゲットのような信号ポイントの自動スキャン機能によって高い精度でスキャンデータを予め定義した座標系に直接嵌め込むことができます。 RiSCAN PROはデータ収集だけではなく、データの後処理機能も提供します。 基本パッケージには、スキャンデータを表示する点群からメッシュを生成し、各レーザー測定に色情報を割り当て、メッシュのテキスチャーリングの為に無歪画像と合成した高分解能画像を生成したり、点群の削除や点群からのオブジェクト構築など多数の機能が含まれています。 RiSCAN PRO,そのプロジェクト構造及びプロジェクトファイルは、多数の後処理ソフトにデータをスムーズに転送できるように、注意深く設計されています(『後処理ソフトへのインターフェース』をご参照ください)。 XML-ベースのプロジェクトファイル構造は公表されており、十分な定評があり、簡単な方法で全てのプロジェクト情報にアクセスすることが可能になっています。 RiSCANLibと組み合わせれば、スキャンデーターに都合の良い方法でアクセスすることが可能です。 |
 Preview for detail scan |
グローバル座標へのレジストレーション
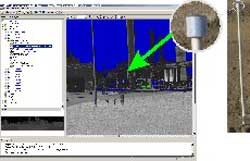 retro-reflective targets |
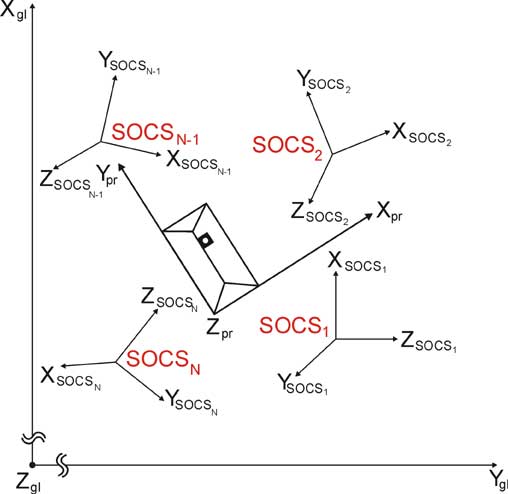
RiSCAN PROによってスキャンデータをグローバル座標系に、直接的に、そしてフレキシブルな方法で嵌め込むことができます。 一般的に全てのRieglレーザーセンサーは、しっかりと定義されたセンサー自体の座標系を持っています。 ユーザーはグローバル座標系内にプロジェクト座標系を定義します。 グローバルからプロジェクトへの移行は、ほとんどの場合は単なる平行移動ですが、グローバル座標系の定義によって、ある場合は座標系も交換します。 これは、単精度座標値をもった右回りプロジェクト座標系と、点群オブジェクトそして3Dビューを得るためです。 RiSCAN PROはコントロールポイントのグローバル座標系を基礎に自動的に変換マトリックスを提供し、従ってプロジェクト座標系を提供します。 もっとも高い精度での嵌め込みは既知の座標系(例えばトータルステーションで得られる)の反射器ターゲットを用いて、最低4箇所の各スキャン位置での精密スキャンニングによって達成されます。 RiSCAN PROの自動リフレクター抽出機能と自動合成機能によって、スキャン位置の登録は現場で行うことができ、オペレーターは点群オブジェクトを作って、それを3Dで観察することによって、データ収集の状況や、データの範囲をチェックすることができます。 これらのコントロールターゲットを設定することが不都合で、かつ精度要求が緩やかな用途ではスキャナー位置をDGPSから得る事が出来て、水準測量で自由度を「1」に減らします。 |
 GPS on top of the scanner |
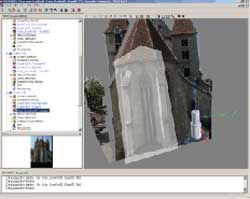
データの可視化及びデータ処理
 Colored point cloud in 2D view |
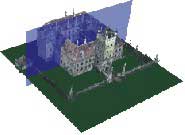
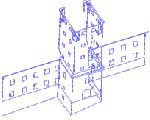
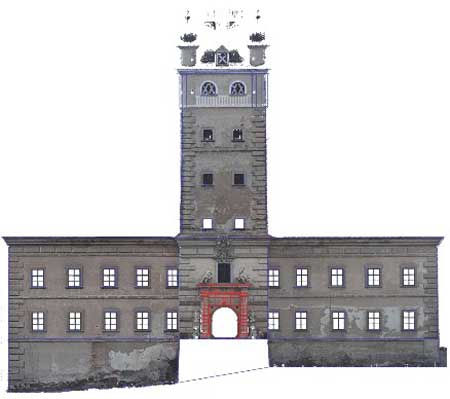
RiSCAN PROはスキャンデータ及び画像データを可視化するための幾つかのツールを準備しています。 スキャンデータは、データ収集中でもオンラインで2D或いは3D表示することが可能です。 オフラインでは、スキャンの2D或いは3D表示に、レーザーセンサーの受光強度、距離や高さによるカラーコード化、およびオプションのトゥルーカラーチャンネルのデータなどの各種のカラーエンコードオプションを付けて見ることができます。 3D可視化機能はシングルスキャンの表示のみでなく、共通座標系での複数スキャンの表示も可能です。 いずれの場合も信号点(タイポイント及びコントロールポイント)を可視化できます。 3Dでは、スキャナー自体の位置と方向がセンサーの3D模型で表示されます。 信号点はオプションの高分解能ディジタルカメラ及びカメラモジュールで撮影し、登録・校正された画像に表示させることもできます。 RiSCAN PROはスキャンデータ及び画像データから反射器による信号点を自動抽出させることもできます。 オリジナルのスキャンデータは、追加の記述子(例えば受光強度情報)とともに整理された点群として取り組むことができます。 リーグル社の3Dレーザーセンサーは高速データ収集ができるため、収集したデータ点数は非常に大きくなりがちです。 そこでRiSCAN PROには、全てのスキャンを平均化して、定義できるサイズのボリュームエレメント内に、多数のスキャンの点数を減らすためのオクツリーベースのフィルターを装備しています。 これらの平均化された点群は、現場でのデータ収集の完成度をチェックするのに大変役立ちます。 点群は登録されたディジタル画像から色付けすることができます。 また点群を小さな点群に分割し、モデリングやエクスポートすることもできます。 メッシュ面の生成によって、点群データから三角メッシュ表面に移ることができます。 クリーニングアルゴリズムによって、データのクオリティーは改善されます。 さらにスムージングと、その後の縮小によって、データのノイズを減らし、所定のデータ精度を保ちながらデータサイズを小さくします。 メッシュデータにも受光強度と色彩情報のような頂点に関連する情報が含まれていますが、高分解能画像を三角メッシュ表面にマッピングするためのテクスチャー座標も含まれています。 RiSCAN PROは常に、トゥループロジェクト座標系及びグローバル座標系を含む各種の座標系で幾何学データを提供します。 さらに、受光強度及びカラーの追加情報を取り出すことも可能です。 RiSCAN PROは、追加の深度情報を持ったオルソフォトを効率的に生成することができます。 情報は、例えばCADプログラムでオルソ画像に基づいて3Dエレメントを組み立てるのに使用できる深度情報を持った、所謂トゥルーオルソフォトを形成するためにスキャンデータとディジタル画像から取り出されます。 |
 Union view of three different scans in 3D view, color coded |
|
 Read out panel with global coordinates |
|
 Colored point cloud with polygon filter |
|
 Textured mesh |
推奨システム
Operating system: Windows XP (recommended), Win98 SE, Windows NT SP4 or Win2000 SP2 or above
Memory requirements: 256 MB RAM minimum, 1024 MB or more recommended
Disk space requirements: 5 GByte available on HDD
Interface for scanner communication: TCP/IP interface (Serial and ECP parallel)
Graphics requirements: OpenGL accelerated graphics, nVIDIA GeForce series recommended, GeForce 2 or better
Peripherals: 3 button mouse, optical scroll-wheel mouse recommended
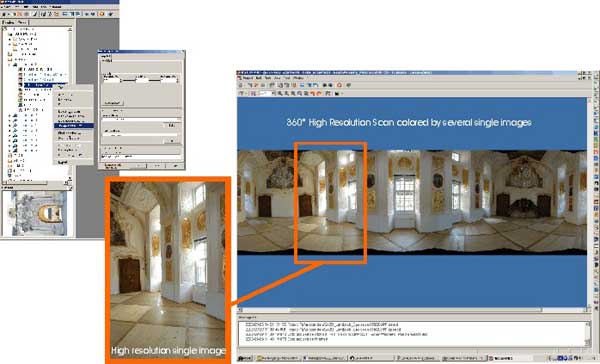
カメラモジュール(オプション)
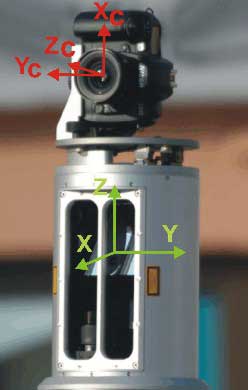 |
高性能レーザーセンサーと高分解能ディジタルカメラとの組み合わせによって、レーザースキャニングと写真測量の両分野の利点を備えた測定システムが構築されます。 オプションの高分解能ディジタルカメラは、レーザーセンサーの上部にしっかりと取り付けられます。 カメラモジュールが高分解能ディジタルカメラに関するRiSCAN PROの機能へのアクセスを可能にします。 カメラモジュールにはオンライン画像収集の機能とカメラキャリブレーションの機能が含まれています。 スキャンデータの収集後、RiSCAN PROはスキャンデータの視界をカバーする一連の写真を撮影します。 スキャナー座標系に関するカメラの取り付け位置及び方向は十分に定義されていますので、各画像は校正され、レジスターされた画像となります。 画像データはスキャンデータの各点に色を割り当てたり、スキャンデータから生成されたメッシュ表面への高分解テクスチャーとして画像を利用することができます。 納入されたカメラは校正されています。 再校正が必要になった場合、カメラモジュールは校正のために必要な機能を提供します。 画像は、文書化され、アクセス可能な画像校正及び画像登録に関連する全ての情報とともにオープンなプロジェクト構造に嵌め込まれていますので、この画像を、例えば近距離写真測量のようなサードパーティーの用途に使用することも可能です。 |
トゥルー オルソフォト モジュール
このアドオンモジュールはスキャンデータと写真画像データから「トゥルー・オルソフォト」を作成する為に使用できます。
さらに、モジュールはプロジェクト座標系内における、オルソフォトの画像データに対する深度情報と方向情報を提供します。 ドキュメントフォーマット(ZOPフォーマット)内の別のファイルに含まれている、この追加情報はCADソフト(例えばAutoCAD)でのオルソフォト上に3Dで構築できる可能性を提供します。データ生成はユーザーが、深度情報と使用するスキャン画像とともにオルソフォトの方向、位置、分解能、及び錐台のサイズを規定することによって行われます。
 Scan-Data and Photo aquisitionwith RiSCANPRO and theobtional Camera module |
 Data processing of 3D-Orthophotos |
 Point-selection in scandata forplane-definition of 3D-Orthophoto |
 interactive digitizingof structures |
 fully automatic generation of3D-profiles |
 easy extraction of basictopology |
 Generation of triangulated meshes Drapping high resolution photographs over meshes Export of the Orthophotos in various Bitmap-formats |
||
バンドル ブロック調整モジュール
RiSCAN PRO内の「バンドル ブロック調整」用のこのモジュールは、「TU Vienna Institute of Photogrammetry and Remote Sensing」によって開発されたプログラムORIENTの基づいています。 ORIENTは主として写真測量の点決定の分野での正確な調整を実行することを意図したプログラムシステムです。 「バンドル ブロック調整」機能の主な目的は、プロジェクト内で有効なスキャナー位置での方向と位置を調整した後に、j全体的な残差を最小にすることです。
多数の観測結果やパラメーターが同時に処理されます。 RiSCAN PROに関連して必要な機能の一部は次のようなものです。
ORIENTはRiSCAN PROにスムースに組み込まれています。 それは反射ターゲットを使ったスキャン位置の自動マッチングに基づいてRiSCAN PROの予備調整を使用します。 さらに、モジュールは高分解能画像内にのみ表示されるコントロールポイントとタイポイントも含ませることができます。 例えば色付けされた非反射信号で、これは調整のための広範囲な精密な分析を提供します。
正確なポリゴンモデルの生成方法
LMS-Z210/Z360/Z420のデータから正確なポリゴンモデルを作りだすのに、「PolyWorks/Modeler」の使用は、非常に有効です。「PolyWorks」は包括的なソフトウエアーパッケージですが、3Dデータから高精度のポリゴンモデルを短時間に生成します。
代表的な用途例は;
標準的なプロセスは次のように行います。
 |
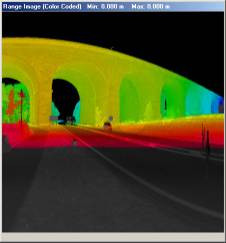 |
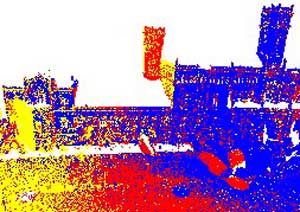
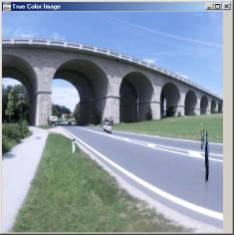
| 例として、高架橋をLMS-Z210/Z360/Z420によって8ヶ所からスキャンニングしたものです。 右側は距離画像をカラーコード化(10m~160m)したもので、左はカラー画像です。 |
|
 |
PIFフォーマットでエクスポートして、限られた視野、 (デフォルトでは40x40度)をカバーする ファイルを生成します。 例では、レンジゲート(10m~160m)で制限された約40x80度の視野が5度のオーバーラップを持った40x40度以下の6個のセグメントに分割されます。 |
 |
データセットの合成の為にデータを 「PolyWorks」にインポートするには、 PIFインポートグループの「IMAlign」 機能を使って直接行えます. |
 |
画像は1スキャンのデータです。色の違いは「3D-RiScan」でエクスポートされた(40x40度の視野の)継ぎ目を示しています。 |
同じ方法で「PolyWorks IMAlign」は他の7スキャンのデータをインポートします。 「IMAllign」はオーバーラップしている範囲の誤差を最小化するすることによって、スキャンデータを自動的に調整して、全8データスキャンの共通の3Dモデルを形成します。 従ってデータのアライメントは相当する測定の数組のデータだけによるのではなく、多数の測定点に基づいておこなわれます。
「IMEdit」でモディファイしVRMLファイルとしてストアーしたポリゴンモデルは「IMView」で正射影及び透視図として表示されます。